
Conception et réalisation de systèmes optiques légers et petits infrarouges à ondes longues
La région spectrale infrarouge à ondes longues de 8 à 14 µm n'est pas seulement la fenêtre atmosphérique, mais également la bande concentrée d'énergie de rayonnement thermique des objets à température ambiante.
Le système photoélectrique passif travaillant dans cette zone détecte principalement le rayonnement thermique de la source cible elle-même. Il peut fonctionner toute la journée, est passif et offre une bonne dissimulation. Il peut être utilisé dans l'armée pour la reconnaissance, la capture, le suivi, etc. de cibles. Il peut également être utilisé dans des applications telles que l'alerte aux incendies de forêt, la surveillance de sécurité nocturne et la recherche et le sauvetage.
Les instruments de détection infrarouge à ondes longues destinés aux applications de télédétection sont généralement montés sur des plates-formes telles que des satellites, des avions et des drones. Les recherches sur les applications des drones se sont multipliées ces dernières années.
Les États-Unis continuent de promouvoir l’utilisation de capteurs d’imagerie multispectrale embarqués sur des drones. En mars 2018, le Corps des Marines des États-Unis a déployé pour la première fois un petit drone à oeil instantané à quatre rotors d'une hauteur de vol de 3 657,6 m, équipé de trois capteurs photoélectriques infrarouges et d'un capteur infrarouge thermique prospectif.
En juillet 2018, la société russe Zala a déployé pour la première fois le lidar sur des drones grâce à une meilleure connaissance de la situation et à des capacités de collecte de données plus rapides. Actuellement, le capteur photoélectrique MEOS monté sur le « UAV Dome » de la société israélienne Rafal peut détecter des cibles d'une taille minimale de 20 cm2 à une distance de 3,2 km et un champ de vision instantané de 0,14 mrad.
Les charges utiles optoélectroniques adaptées aux drones se sont développées rapidement en termes de fonctionnalité et de performances et peuvent obtenir des images et des données de haute qualité en temps réel de jour comme de nuit, ce qui améliore considérablement les capacités de reconnaissance, de surveillance et de capture de cibles.
Cependant, en raison de la capacité de charge limitée des drones, des performances de charge utile élevées, un poids léger et une petite taille sont nécessaires, et en même temps, pour les applications commerciales et par lots à grande échelle, ils présentent également les caractéristiques d'un faible coût.
En raison des avantages d'une attitude de haute précision et contrôlable dans une large plage, les nacelles optoélectroniques sont largement utilisées sur les plates-formes de drones, tandis que les instruments optoélectroniques installés dans les nacelles optoélectroniques ont des contraintes de volume et de poids plus strictes, et leurs systèmes optiques doivent être pris en compte. Conception légère et compacte.
Avec la tendance au développement de la miniaturisation et de la légèreté des systèmes optiques infrarouges, la forme de la surface des lentilles optiques est souvent plus compliquée. Des exigences plus élevées sont également imposées à la qualité microscopique de la surface optique des matériaux durs et cassants aux infrarouges tels que le germanium et le séléniure de zinc.
À l'heure actuelle, la technologie de tournage au diamant en un seul point est largement utilisée dans le traitement à froid des pièces optiques infrarouges. En fonction de certains matériaux et d'autres paramètres, la précision de tournage du diamant en un seul point, les paramètres de tournage, les vibrations de la machine et les méthodes d'usinage des surfaces sphériques peuvent être optimisés.
Selon les exigences d'indice et les contraintes de plate-forme de l'instrument, Quanhom propose une structure optique catadioptrique légère, petite et compacte qui simplifie la forme optique principale pour l'application de détecteurs de réfrigération, qui convient aux pods optoélectroniques d'UAV produits en série à ondes longues. caméras infrarouges.
La conception optique, le traitement, la configuration d'inspection et les expériences d'imagerie de cette caméra seront décrits en détail ci-dessous.
1. Contraintes de la plate-forme et exigences d'index
1.1 Méthode de détection et contraintes de ressources
Le système optique est installé dans le module optoélectronique et monté sur le drone. L'instrument a un champ de vision moyen. Grâce à la rotation bidimensionnelle du module optoélectronique, la recherche de cible sur une large zone est réalisée, la cible est trouvée et verrouillée pour le suivi. Comme le montre la figure 1, la nacelle optoélectronique adopte une structure sphérique, le rayon de la nacelle est inférieur à 200 mm, le diamètre de la fenêtre est de 165 mm, l'espace optique est de 320 mm × 310 mm × 302 mm (y compris le détecteur) et l'optique -la masse mécanique de la caméra doit être inférieure à 2,0 kg (non inclus). y compris platine vinyle et électronique).
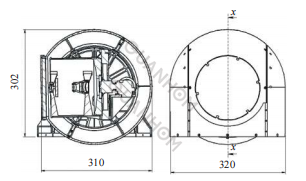
Fig.1 Diagramme schématique de la méthode de détection
1.2 Indicateurs liés à la conception optique
Afin d'améliorer la sensibilité du détecteur de l'instrument, l'ensemble de la machine utilise un détecteur à zone refroidie, la taille de pixel nx×ny est de 320 × 256, la taille de pixel p est de 30 μm × 30 μm et les paramètres de conception du système optique sont affichés dans Tableau 1.
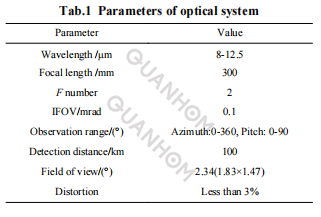
Selon les exigences de la distance de détection la plus éloignée de l'instrument, le diamètre D du système est résolu à 150 mm. Si le nombre F du détecteur est 2, la distance focale du système f est de 300 mm, le champ de vision instantané IFOV = p/f = 0,1 mrad, c'est-à-dire que la résolution de la cible à 100 kilomètres est de 10 m et le champ de vision Le champ de vision est :
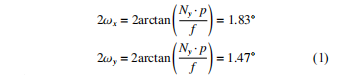
Autrement dit, le champ de vision circulaire diagonal est de 2,34°.
2. Conception optique
2.1 Considérations de sélection
Les structures du système optique infrarouge comprennent des structures transmissives, réfléchissantes et catadioptriques. En raison du peu de matériaux optionnels et de l'adaptation à 100 % de l'écran froid du groupe de lentilles de transmission, la lentille avant a un grand diamètre et un volume et un poids importants, mais elle est relativement facile à traiter et à ajuster. Il convient aux petits et moyens diamètres, aux résolutions moyennes et basses et aux grands champs de vision.
Le système réfléchissant n'a pas d'aberration chromatique, mais le champ de vision est relativement petit, et l'installation et le réglage sont relativement petits. Difficile, adapté aux moyennes et grandes ouvertures, moyenne haute résolution, petit champ de vision ; le système catadioptrique présente les avantages des deux premiers, une forte capacité de correction des aberrations, une taille compacte, peut atteindre une correspondance d'écran froid à 100 % grâce à l'imagerie secondaire, pour les occasions de moyen et grand calibre, moyenne et haute, le champ de vision moyen.
Compte tenu de l'analyse comparative ci-dessus, combinée aux exigences de la plate-forme de chargement du drone en termes de volume, de poids et de distance de détection de l'instrument, le système sélectionne une structure optique catadioptrique et prend en même temps en compte le coût et le cycle. du traitement, de l'inspection et de l'assemblage, pour l'application de détecteurs de réfrigération, une structure optique catadioptrique qui simplifie la forme optique principale est proposée dans la conception optique.
2.2 Structure initiale
Dans de nombreuses références, le système optique de la caméra infrarouge catadioptrique adopte la structure du système principal à deux miroirs et du groupe de lentilles de correction. La conception optique résout généralement d'abord la solution initiale de la structure à deux miroirs, puis ajoute le groupe de lentilles pour l'optimisation.
Définissez le taux d'obscuration et le type d'aberration à corriger, définissez le coefficient d'aberration correspondant à zéro, résolvez le rayon de courbure, le coefficient conique et l'intervalle central des miroirs primaire et secondaire, puis zoomez sur la construction initiale du un système à deux miroirs peut être réalisé.
Dans le système catadioptrique couramment utilisé, l'optique principale est une structure de cassette qui corrige l'aberration sphérique et l'aberration de coma, et le miroir primaire et le miroir secondaire sont tous deux des hyperboloïdes.
Un groupe de lentilles de correction est ajouté derrière, et le groupe de lentilles de correction est généralement sphérique. Le système simplifie le système pliable couramment utilisé en tenant compte du volume et du poids, de la difficulté d'assemblage et de réglage, du coût de développement et de l'environnement d'utilisation.
Le système catadioptrique simplifié est composé d'un système principal plié de Newton et d'un groupe de miroirs de correction. Le miroir principal du système principal est simplifié en paraboloïde, le miroir secondaire est simplifié en miroir plan et le miroir secondaire n'a aucune puissance uniquement pour le chemin optique plié, qui est ajouté au groupe de miroirs de correction. Nous pouvons ajouter de l'asphérique pour corriger les aberrations hors axe.
Le diagramme schématique simplifié du chemin optique du système primaire plié de Newton est illustré à la figure 2, où h1et h2sont les hauteurs sur les miroirs primaire et secondaire de la lumière respectivement au bord du champ de vision central.
je2et moi2' sont la distance objet et la distance image du miroir secondaire, et F1' est la distance focale principale du miroir, R01est le rayon de courbure central du miroir primaire, R2est le rayon de courbure du miroir secondaire, d est l'intervalle entre les miroirs primaire et secondaire, α est le taux de blocage du miroir secondaire et β est le grossissement du miroir secondaire. Pour le système simplifié, les expressions suivantes sont valables :
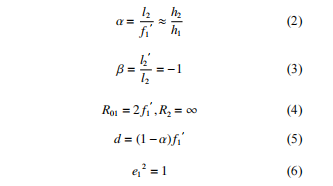

Fig.2 Schéma simplifié du système principal pliable Newton
Les étapes initiales de solution de structure du système sont les suivantes : (1) attribuer la puissance de l'optique principale et de la lentille de correction, déterminer f1' et déterminer le rayon de courbure central R01 du miroir principal selon la formule (4) ; (2) Réglez le taux de blocage α, selon la formule (5) Résolvez l'intervalle d des miroirs primaire et secondaire ; (3) Attribuez au préalable la puissance optique du groupe de lentilles de correction et définissez la distance de l'objet du groupe de lentilles de correction.
Les avantages de cette conception sont :
(1) Il n'est pas nécessaire de concevoir des miroirs de compensation ou des hologrammes pour traiter et ajuster le miroir primaire parabolique. L'installation et le réglage du système optique principal consistent principalement à installer sans stress le miroir parabolique principal. La détection et l'ajustement sont relativement simples, le coût de développement est faible et le cycle de développement est court.
(2) Déplacez la surface asphérique vers la lentille du groupe de lentilles de correction et utilisez la technologie de tournage diamant à point unique pour traiter. Les procédures de traitement et les coûts de la surface asphérique à symétrie de rotation et de la surface sphérique sont fondamentalement les mêmes, et la précision de forme de surface de la lentille de petit diamètre est élevée.
(3) La pupille de sortie du système optique se trouve derrière le groupe de lentilles de correction et est connectée à l'écran froid du détecteur pour obtenir une correspondance d'écran froid à 100 %, réduire l'influence du fond thermique et améliorer la sensibilité.
(4) Le groupe de miroirs de correction se trouve entre les miroirs primaire et secondaire, le plan focal du système est près du miroir primaire et les composants de réfrigération et les pièces d'installation du détecteur se trouvent à l'arrière du miroir primaire, ce qui permet de raccourcir le volume de la caméra et installation du détecteur.
Les avantages ci-dessus conviennent au développement rapide par lots de systèmes légers, petits et compacts.
2.3 Conception et résultats optimaux
Saisissez la structure initiale dans le logiciel. Par souci de simplicité, le groupe de lentilles de correction est divisé en puissances positive, négative, négative et positive, et le 19,8 mm devant le noyau du détecteur (là où se trouve l'écran froid) est défini comme pupille de sortie (ou STOP). du système.
Modifiez la fonction avantage pour contrôler l'épaisseur de la lentille, l'intervalle, la distance focale, la distorsion et la qualité de l'image, etc., et essayez de contrôler la pupille d'entrée pour effectuer un traçage de rayons près du miroir principal. Les résultats de conception sont présentés dans le tableau 2.
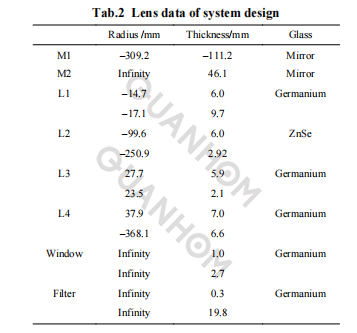
La figure 3 est le diagramme du trajet optique de la caméra infrarouge, le miroir primaire est un paraboloïde, le miroir secondaire est un plan, la surface avant du miroir 1 et la surface arrière du miroir 3 dans le groupe de miroirs de correction sont des surfaces quadriques, et le la longueur axiale totale du système est de 125 mm.
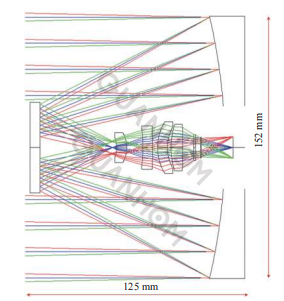
Fig.3 Disposition 2D
Comme le montre la figure 4, les valeurs MTF de chaque champ de vision dans la plage spectrale de 8 à 12,5 µm sont proches de la valeur limitée par la diffraction à la fréquence de Nyquist, toutes supérieures à 0,4 ; la distorsion du système est inférieure à 2,8 % dans tout le champ de vision.
3. Analyse de faisabilité technique
3.1 Analyse de tolérance
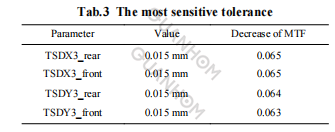
L'analyse des tolérances vise à fournir des valeurs de référence de contrôle de précision pour l'usinage de pièces optomécaniques et l'assemblage de composants. Le système définit la forme de la surface, l'excentricité et l'inclinaison de la surface, l'excentricité et l'inclinaison des éléments, l'épaisseur centrale et l'intervalle de la lentille optique, définit la variable de compensation du plan focal, obtient les paramètres les plus sensibles grâce à l'analyse aléatoire de Monte Carlo et ajuste les paramètres sensibles pour faire du Monte Carlo L'analyse de Lowe a abouti à une réduction de la correspondance inférieure à 15 %.
L'analyse des tolérances de l'ensemble du système est effectuée et les éléments de tolérance sensibles sont répertoriés dans le tableau 3. Le décentrement de surface (TSD) et l'inclinaison (TST) de la troisième lentille incurvée sont plus sensibles, ce à quoi il faut prêter attention lors de l'analyse. développement de systèmes opto-mécaniques. Les tolérances non répertoriées restantes sont plus générales.
3.2 Analyse de l'adaptabilité de la température
Sans contrôle thermique, la température ambiante de fonctionnement de la nacelle optoélectronique embarquée du drone est d'environ –40 ~ 60 ℃. Cependant, compte tenu du coût et des ressources en volume accordées au système optique par le module optoélectronique, le schéma de conception thermique est le suivant : contrôle thermique primaire combiné à une conception optique adaptative dans une plage de température limitée. Autrement dit, la température dans la nacelle photoélectrique est contrôlée entre 15 et 25 ℃ grâce à un contrôle thermique primaire (la différence de température radiale est inférieure à 2 ℃ et la différence de température axiale est inférieure à 5 ℃).
Dans cette plage de températures, la dérive de température de la surface de l'image de l'instrument est nécessaire pour répondre aux exigences de résolution spatiale sans mise au point. De cette manière, le contrôle thermique préliminaire est plus facile à réaliser, ce qui réduit non seulement la pression sur le système optique, mais réduit également le coût, et les performances du système peuvent répondre aux exigences de demande de prêt.
Le groupe de lentilles de correction peut dissiper efficacement la différence de chaleur dans la plage de températures de fonctionnement ci-dessus grâce à une adaptation de matériaux et à une distribution de puissance optique et présente les caractéristiques d'une structure simple et d'un faible poids et volume.
Le matériau optomécanique du système principal est en aluminium, le groupe de lentilles de correction utilise quatre lentilles en germanium, séléniure de zinc, germanium et germanium, et la structure du barillet de lentille est en aluminium. Le schéma d'adaptabilité environnementale de la caméra consiste à adopter la conception principale de contrôle thermique et d'adaptabilité optique dans une plage de température limitée. Pesez les ressources volumiques fournies par le module optoélectronique au système optique et contrôlez la température dans le module optoélectronique entre 15 et 25 °C grâce à un contrôle thermique primaire.
Le miroir du système principal et la structure de la caméra sont tous en aluminium et la masse de la caméra est de 1,8 kg (détecteur compris). La température de référence est réglée à 20 °C, la différence de température radiale est de 2 °C et la différence de température axiale est de 5 °C. Les fonctions de transfert optique sont toutes supérieures à 0, 3 à la fréquence de Nyquist, comme le montre la figure 6 (a). De plus, les fonctions de transfert correspondant aux points de température aux deux extrémités de la simulation logicielle à 15 ° C et 25 ° C sont toutes supérieures à 0, 33, comme le montrent les figures 6 (b) et (c).
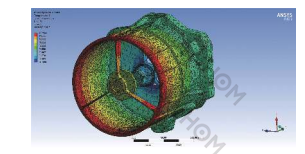
Fig.5 Modèle d'analyse par éléments finis
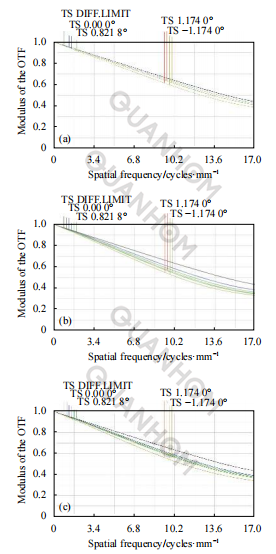
Fig.6 Simulation de la fonction de transfert
4. Expériences d'inspection, d'assemblage et d'imagerie de traitement
4.1 Contrôle du traitement optique
Les miroirs du système principal et les lentilles du groupe de miroirs de correction sont traités par la technologie de tournage diamant à point unique (SPDT) [12−14]. Le miroir primaire et le miroir secondaire de l'optique primaire sont en aluminium optique T6061, comme le montre la figure 7.
Après tournage et polissage, la précision de la forme de la surface est encore améliorée, toutes deux meilleures que λ/20 à 632,8 nm ; Les lentilles sont toutes des surfaces sphériques ou asphériques à symétrie de rotation. L'ébauche du miroir est en germanium ou en séléniure de zinc. Le matériau infrarouge à petite ouverture est facile à traiter et la précision de la forme de la surface est meilleure que 1/20 λ à 632,8 nm.
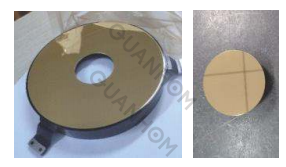
Fig.7 Miroirs primaires et secondaires
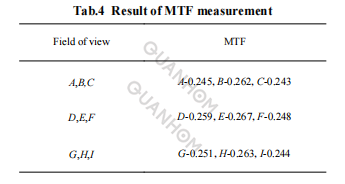
9 points ont été sélectionnés sur le plan holographique, et la MTF a été calculée selon la formule (7) en fonction de la valeur DN de l'image cible. La fonction de transfert du détecteur est calculée à 0,6, et étant donné que la fente est légèrement plus large, la FMT optique du système peut atteindre 85 % de la valeur de conception, ce qui se situe dans la plage acceptable.
4.3 Expérience d'imagerie extérieure
Le site d'expérimentation d'imagerie de localisation du système se trouve au neuvième étage du bâtiment et la durée de l'expérience est une soirée d'hiver. Le diagramme d'imagerie du système est présenté sur la figure 10. Le point a de la scène est un immeuble résidentiel situé à une distance de 2 km, avec des contours clairs et des détails précis ; le point b est une canalisation de bâtiment résidentiel située à une distance de 1 km, avec une échelle d'environ 0,1 m, clairement distinguable ; le point noir en c dans le coin inférieur gauche de l'image représente l'unité extérieure du climatiseur en hiver, et la partie noire dans le coin supérieur droit représente le ciel.
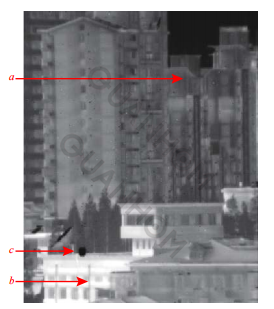
Fig.10 Image de la scène
5. Conclusion
Visant les exigences de détection infrarouge des nacelles optoélectroniques miniatures embarquées sur des drones, un système d'imagerie optique infrarouge à ondes longues pour les applications de détecteurs de réfrigération a été conçu et développé. Une structure pliée newtonienne remplace la structure de cassette couramment utilisée, et la correction de la qualité d'image d'un champ de vision plus large est réalisée en simplifiant la structure du télescope principal et en ajoutant une surface asphérique au groupe de miroirs de correction.
Le système principal adopte une conception de structure optomécanique entièrement en aluminium, et les composants optiques de l'ensemble du système sont traités par une technologie de tournage au diamant à un seul point, ce qui réduit la difficulté de traitement, d'assemblage et de développement et les coûts de développement ; La conception à effet d'écran froid à 100 % est réalisée grâce à une imagerie secondaire, qui réduit le fond thermique infrarouge, ce qui est bénéfique pour améliorer la sensibilité du système. Le système optique présente les caractéristiques d'une petite taille, d'une structure compacte et d'une excellente qualité d'image.
Les résultats finaux des tests d'installation et de mise en service du système montrent que la qualité de l'image répond aux attentes de conception et répond aux exigences des indicateurs techniques du projet. Cet article a une certaine importance de référence pour la conception et le développement d'un système optique infrarouge compact pour la détection infrarouge similaire au module optoélectronique miniature embarqué sur un drone.
Nous sommes un fabricant expérimenté deComposants opto-électromécaniques, dédié à fournir aux utilisateurs une variété de lentilles d'imagerie thermique infrarouge de haute qualité. Nous prenons les besoins des clients comme première priorité et contrôlons entièrement la qualité de nos produits. Pour cette raison, nous sommes équipés d’un système d’inspection de qualité strict pour contrôler la conception, la fabrication et l’exportation des produits. Si vous êtes intéressé par notre objectif d’imagerie thermique infrarouge, veuillez nous contacter immédiatement !
Auteurs : Hao Siyuan, Xie Jianan, Wen Maoxing, Wang Yueming, Yuan Liyin
Date de réception : 2020−01−17 ; Date de révision : 2020−02−08
Source du journal : Vol.49 No.9 Ingénierie infrarouge et laser septembre 2020
Les références:
[1] Cao Yinqi, Qi Yuan, Cheng Gang et coll. Développement et technologies clés de petites nacelles photoélectriques pour drones militaires [J].Aircraft Missiles, 2019(3) : 54-59. (en chinois)
[2] Zhou Feng, Liu Jianhui, Guo Jun et al. Analyse du développement de systèmes d'alerte précoce infrarouge aéroportés étrangers [J]. Laser et infrarouge, 2017, 47(4) : 399-403. (en chinois)
[3]Li Lei, Xu Yue, Jiang Qi et al. Aperçu de l'équipement et du développement technologique des drones militaires étrangers en 2018 [J]. Technologie des missiles tactiques, 2019(2) : 1-11. (en chinois)
[4]Gao Sifeng, Wu Ping, He Manali et al. Estimation de la distance de travail du système infrarouge dans des conditions atmosphériques complexes [J]. Ingénierie infrarouge et laser, 2008, 37(6) : 941-944. (en chinois)
[5] Shi Guanghui. Utilisation de l'optique gaussienne et de la théorie des aberrations du troisième ordre pour trouver la solution initiale d'un objectif zoom [J]. Chine Optique, 2018, 11(6) : 1047-1060. (en chinois)
[6] Chen Li, Liu Li, Zhao Zhicheng et al. Conception d'un système optique à quatre miroirs coaxiaux à longue focale [J]. Ingénierie infrarouge et laser, 2019, 48(1) : 0118002. (en chinois)
[7] Bai Yu, Liao Zhiyuan, Li Hua et al. Conception et analyse d'un système d'imagerie athermique pour la détection infrarouge à ondes moyennes à réflexion pliée [J]. Ingénierie infrarouge et laser, 2015, 44(2) : 407-412. (en chinois)
[8] Jiang Kai, Zhou Sizhong, Li Gang et al. Conception sans chaleur d'un système de zoom pliable à double champ de vision infrarouge à ondes moyennes [J]. Ingénierie infrarouge et laser, 2013, 42(2) : 403-407. (en chinois)
[9] Xiao Guanghui, Hao Peiming. Conception d'un système optique de Newton sans plaque de correction de puissance [J]. Optique appliquée, 2008, 29(5) : 753-757. (en chinois)
[10] Mu Yongji, Mao Yijiang, Hu Mingyong. Conception d'un groupe de miroirs de correction d'aberration de miroir parabolique hors axe [J]. Acta Optica Sinica, 2014, 34(6) : 227-232. (en chinois)