
Méthode de mesure rapide de la distance focale basée sur des images de lentilles infrarouges
La distance focale de l'objectif fait référence à la distance entre le point principal et le point focal de l'optique de l'objectif et constitue un indice de performance important de l'objectif. La longueur focale de l'objectif détermine la taille de l'image prise, la taille du champ de vision, la taille de la profondeur de champ et la perspective de l'image. Par conséquent, la façon de détecter avec précision la distance focale d’une lentille infrarouge constitue un contenu de recherche important dans la détection des paramètres d’une lentille infrarouge.
La méthode de mesure de la distance focale des lentilles infrarouges peut être divisée en méthode directe et méthode indirecte. La méthode indirecte consiste à dériver inversement la distance focale de l’objectif en mesurant l’angle de vue de l’objectif. Cependant, le principe de la méthode indirecte est qu’il n’y a pas de distorsion de l’objectif.
Dans la mesure réelle, notamment pour les objectifs à petite focale, la distorsion n'est pas négligeable, ce qui conduit à l'imprécision de la distance focale de l'objectif calculée par la méthode indirecte ; la méthode directe consiste à obtenir les informations sur l'image cible, puis à obtenir la distance focale de l'objectif.
L'équipement courant actuel est l'équipement de mesure de lentille MTF. Cet équipement a une précision de mesure élevée et une bonne cohérence, mais l'équipement est cher, le coût de mesure de la distance focale de l'objectif est élevé et l'efficacité est faible, ce qui n'est pas propice à la détection rapide des lentilles par lots.
Visant la situation actuelle, cet article propose une méthode de détection rapide de la distance focale de la lentille infrarouge basée sur l'image cible en forme de couteau. Cette méthode collecte l'image de la cible en forme de couteau dans l'état focalisé de la lentille infrarouge, utilise la méthode de segmentation par seuil Otsu pour obtenir l'image binarisée, extrait le contour du bord de la cible, puis utilise la transformation affine pour obtenir le rectangle circonscrit minimum correspondant à la cible tranchante, et le rectangle circonscrit.
Les coordonnées du sommet sont introduites dans la formule de calcul de la distance focale, puis la distance focale correspondante de la lentille infrarouge est estimée. Le procédé permet de réaliser une mesure rapide et précise de la distance focale de la lentille infrarouge par lots, et peut réduire efficacement le coût de la mesure des paramètres de la lentille.
1. Théorie et méthode
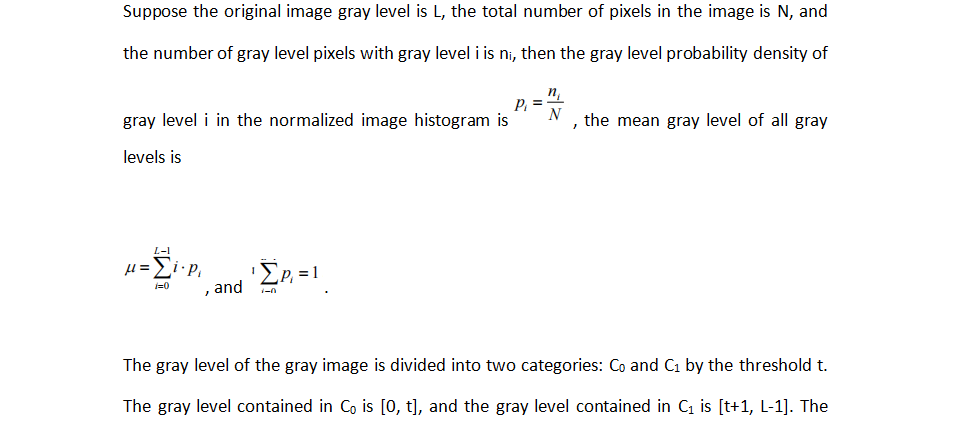
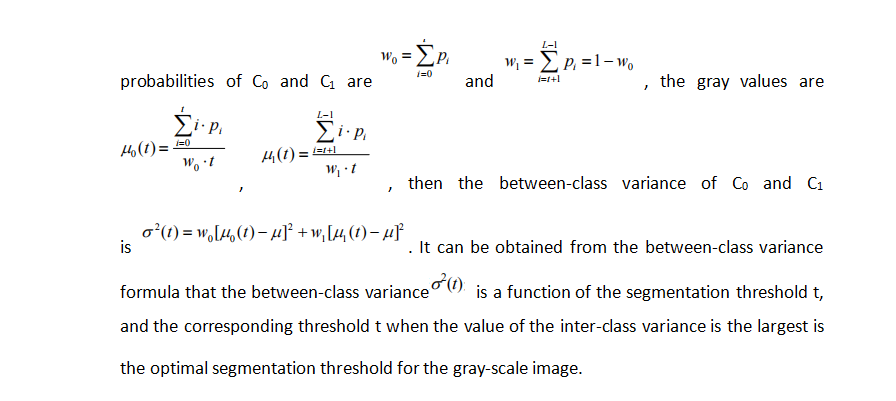
1.1 Segmentation de seuil adaptative
La méthode de variance maximale entre classes (Otsu) est un algorithme général de détection et de segmentation. Étant donné que les doubles pics de l'histogramme gris de l'image n'ont pas de creux évidents ou que les doubles pics et creux ne sont pas évidents, la méthode de variance maximale entre classes convient pour déterminer la position du seuil de segmentation entre les doubles pics.
Cette méthode utilise les moments cumulés d'ordre zéro et de premier ordre de l'histogramme des gris de l'image pour maximiser la fonction discriminante afin de sélectionner le meilleur seuil pour la segmentation de l'image.
1.2 Extraction des bords
L'extraction des contours est une méthode courante pour segmenter des images en fonction de mutations de gris de pixel. Les méthodes d'extraction de bords couramment utilisées comprennent la méthode d'extraction de bords basée sur le gradient morphologique, la méthode d'extraction de bords de Sobel, la méthode d'extraction de bords laplaciens et la méthode d'extraction de bords de Canny.
Le procédé d'extraction de bord basé sur le gradient morphologique consiste à soustraire le résultat de l'expansion morphologique du résultat de la corrosion morphologique dans l'image pour obtenir les informations de contour de bord contenant le gradient cible. Cette opération modifiera la taille des pixels de la cible après l'imagerie et affectera la précision du calcul.
La méthode d'extraction des bords de Sobel et la méthode d'extraction des bords laplaciens ont une faible précision d'extraction des bords lorsque le noyau de convolution est petit. Pour les noyaux de convolution plus grands, davantage de pixels sont utilisés dans le processus d’approximation, la perte de temps est donc importante.
Cet article choisit la méthode d'extraction des bords Canny. Cette méthode calcule d'abord les dérivées du premier ordre dans les directions x et y, puis les combine en 4 dérivées directionnelles et combine les points maximaux locaux dans les dérivées directionnelles pour former des pixels candidats de bord.
Enfin, lors de l'extraction du contour du bord, la méthode Canny utilise deux seuils. Si le dégradé de pixels est supérieur au seuil le plus élevé, il est marqué comme bord valide ; si le dégradé de pixels est inférieur au seuil le plus petit, il est marqué comme bord inefficace ; si le dégradé de pixels est compris entre les deux, ce n'est que lorsqu'il est connecté à un pixel à seuil élevé qu'il est marqué comme bord valide.
1.3 Transformation affine
La transformation affine est une méthode de traitement importante dans la transformation géométrique d'images. Il mappe tout parallélogramme ABCD dans le plan à tout autre parallélogramme ABCD et maintient la rectitude et le parallélisme des segments de droite avant et après la transformation.
Grâce à la transformation affine, des transformations géométriques telles que la translation, la rotation, l'expansion et l'inversion de l'image peuvent être réalisées. La transformation affine sur l'espace euclidien bidimensionnel peut être exprimée par la formule (1). Selon la formule (1), la transformation affine typique a principalement les types suivants :
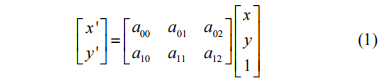
(1) Transformation translationnelle. Déplacez le point (x, y) vers le point (x + a, y + b), alors la matrice de changement est :

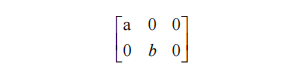
(2) Mise à l’échelle et transformation. Si la coordonnée horizontale du point (x, y) est agrandie ou réduite par fois, et l'ordonnée est agrandie ou réduite par b fois, la matrice de transformation est :
(3) Transformation de rotation. Faites pivoter le graphique cible dans le sens inverse des aiguilles d'une montre en radians autour de l'origine, la matrice de transformation est alors :

1.4 Dérivation de la formule de calcul de la distance focale
Le diagramme schématique de la cible rectangulaire via le système d’imagerie optique est présenté à la figure 1.

Fig.1 Diagramme schématique de l'image cible par le système optique
Où x_target est la largeur physique de la cible rectangulaire et y_target est la hauteur physique de la cible rectangulaire, toutes deux en mm. La taille de l'image de sortie de la cible rectangulaire après avoir été imagée par le système optique est m×n, et la taille en pixels de la cible dans l'image est qp et sr, et les unités sont toutes des pixels. En utilisant la relation triangulaire du système d’imagerie optique, la relation suivante peut être obtenue :

Où : ppH est la taille horizontale du détecteur, μm ; Fcolest la distance focale du tube collimateur, en mm ; Flenest la distance focale de la lentille infrarouge, mm. La relation entre le champ de vision horizontal instantané du détecteur et la distance focale de l'objectif est la suivante :

Par conséquent, la distance focale de la lentille infrarouge :

Parmi eux, en remplaçant l'équation (2) par l'équation (3), l'angle de champ de vision horizontal instantané du détecteur peut être obtenu :

2. Résultats expérimentaux et analyse
La cible sélectionnée dans cet article est une cible en lame de couteau avec un rayon de 16 mm, une distance focale de collimateur de 260 mm, un détecteur non refroidi avec une résolution de 640 × 512, un espacement des pixels de 17 μm et une distance focale théorique de la lentille infrarouge est de 54 mm.
La figure 2(a) est l'image de sortie de la cible en forme de couteau via le système d'imagerie optique lorsque la lentille infrarouge est dans l'état focalisé, la figure 2(b) est le résultat de l'extraction du bord de la cible après la binarisation de l'image, et La figure 2 (c) est la simulation cible. Le résultat de sortie après transformation radiographique. La figure 2 (b) montre que le procédé peut extraire avec précision le contour du bord de la cible en forme de couteau.
En intégrant les coordonnées des sommets du rectangle circonscrit de la cible en lame de couteau sur la figure 2 (c) dans les formules de calcul (4) et (5), la distance focale réelle de la lentille infrarouge de 54 mm peut être obtenue comme 56,1406 mm. , et la distance focale de l'objectif a été testée par l'organisme de certification. Elle est de 55,7360 mm, l'erreur absolue est de 0,4046 mm et le pourcentage d'erreur est de 0,7.

(a) L'image originale (b) Image après extraction des bords (c) Image après transformation du rayonnement
Fig.2 L'organigramme de traitement de l'image cible en forme de couteau
Afin de vérifier l'universalité de l'algorithme de cet article, les distances focales de 5 lentilles infrarouges de 54 mm et 8 mm dans le même lot ont été calculées respectivement et comparées aux résultats des tests de l'organisme de certification, comme indiqué dans le tableau 1. et Tableau 2. En combinant les formules (4) et (5), les paramètres qui affectent la précision de la mesure de la distance focale de la lentille infrarouge comprennent la taille horizontale du pixel du détecteur, la distance focale du collimateur, la taille physique de la cible rectangulaire et la pixels horizontaux occupés par la cible dans l’image.
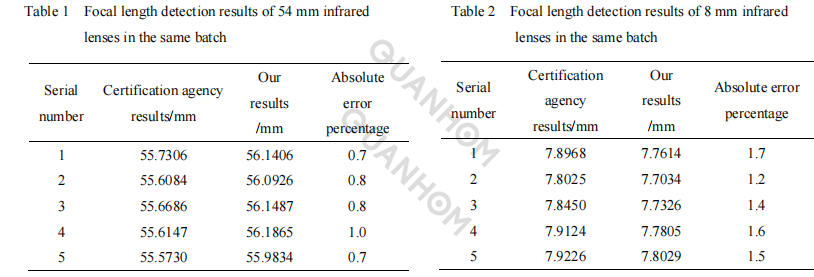
Parmi eux, la taille horizontale du pixel du détecteur, la distance focale du collimateur et la taille physique de la cible rectangulaire sont affectées par la précision d'usinage des pièces usinées, et il existe certaines erreurs, de sorte que l'ensemble de la plate-forme de détection doit être calibré. La précision de la valeur calculée des pixels horizontaux occupés par la cible dans l'image est liée à la distance focale de l'objectif de mesure.
Une lentille infrarouge avec une grande distance focale a une résolution d'image élevée et l'erreur estimée a peu d'effet sur le résultat, tandis qu'une lentille infrarouge avec une petite distance focale La résolution de l'image formée par l'objectif est faible et l'erreur de l'estimation a une grande influence sur le résultat.
Par conséquent, lors du calcul des pixels horizontaux occupés par la cible dans l'image, il est nécessaire d'effectuer un traitement de sous-pixel sur l'image pour réduire l'erreur d'estimation, améliorer la précision d'estimation de la valeur, et ainsi améliorer la précision de mesure de distance focale. Comment améliorer la précision des mesures de la distance focale de la lentille infrarouge sera la prochaine étape de l'équipe de recherche.
3. Conclusion
Cet article présente une méthode de détection rapide basée sur l’image de la distance focale d’une lentille infrarouge. Le résultat de la comparaison montre que le pourcentage d'erreur absolu moyen de la distance focale de l'objectif estimé par cette méthode est inférieur à 1,48 par rapport au résultat de détection de la distance focale de l'organisme de certification. La validité et la précision de la méthode sont confirmées et les bases sont posées pour la détection rapide de paramètres importants de la lentille.
Quanhom continue de rechercher et de développer de nouvelles technologies de détection, et d'évaluer et d'améliorer avec précision les performances des lentilles optiques infrarouges. Nous pouvons non seulement fournir aux utilisateurs des produits de haute qualité, mais également formuler des solutions réfléchies basées sur les besoins réels des utilisateurs.
En tant que fabricant expérimenté deComposants opto-électromécaniques, Quanhom s'engage à fournir aux utilisateurs une variété de caméras infrarouges thermiques (LWIR, MWIR et SWIR) d'excellente qualité. Nous jouissons d’une bonne réputation dans l’industrie grâce à une technologie de R&D de pointe et une excellente technologie de fabrication. Et nos produits sont vendus partout dans le monde et ont reçu les éloges et la confiance de nombreux clients. Si vous souhaitez en savoir plus sur nos services associés, vous pouvez nous faire part de vos besoins, et nous vous apporterons une réponse satisfaisante dans les plus brefs délais.
Auteurs : Zhong Jianbo, Li Maozhong, Xia Qingsong, Luo Yongfang, Jia Yuchao, Wang Caiping, Li Hongbing, Luo Hong, Huang Pan
Source du journal : Technologie infrarouge, Technologie infrarouge, juin 2021
Date de réception : 2019-04-30 ; date de révision : 2021-06-10.
Les références:
[1] 许士文.红外成像系统测试与评价[M]. Publié : 红外与激光工程, 2008 : 150-180.
[2] Ohtsu N. Une méthode de sélection de seuil à partir d'histogrammes de niveaux de gris [J].IEEE Transactions on Systems Man & Cybernetics, 1979, 9(1) : 62-66.
[3] Imocha Singh, Tejmani Sinam. Technique de contraste local et de seuillage basé sur la moyenne dans la binarisation d'images [J]. Revue internationale des applications informatiques, 2012, 51(6) : 5-10.
[4] 赵文涛, 曹昕鸷, 田志勇. [J].红外技术, 2018, 40(2) : 158-163. ZHAO Wentao, CAO Xinzhi, TIAN Zhiyong. Une méthode de segmentation de cible de navire infrarouge basée sur la croissance adaptative de région de seuil [J]. Technologie infrarouge, 2018, 40(2) : 158-163.
[5] 郝争辉, 张学松, 王高, 等.基于边缘轮廓线提取的自动对焦评价函数[J].红外技术, 2018, 40(2) : 170-175. HAO Zhenghui, ZHANG Xuesong, WANG Gao et al. Fonction d'évaluation de la mise au point automatique basée sur l'extraction du contour des bords [J]. Technologie infrarouge, 2018, 40(2) : 170-175.
[6] Gábor Domokos, Zsolt Lángi, Márk Mezei. Un modèle d'évolution de forme sous transformations affines[J/OL][2017-09-18]. arXiv:1604.07630 (https://arxiv.org/abs/1604.07630v2).