
Que sont les pixels morts, les images fantômes et l’effet de couvercle de pot en imagerie infrarouge ?
Cet article présente plusieurs phénomènes d'imagerie qui se produisent souvent dans l'imagerie infrarouge - mauvais pixels, effet fantôme et effet de vignettage. Il présente également quelques méthodes pour résoudre ces défauts, telles que la correction de la non-uniformité, la compensation, la SDRAM et la FLASH.

1. les mauvais pixels
Lesmauvais pixels désignent les taches claires et sombres dont les coordonnées ne changent pas en fonction de la cible sur l'image infrarouge. Les mauvais pixels sont également appelés pixels non fonctionnels (y compris les pixels surchauffés et les pixels morts). Les pixels dont la tension de bruit est supérieure à 10 fois la tension de bruit moyenne sont appelés pixels surchauffés (points blancs), tandis que les pixels dont le taux de réponse est inférieur à 1/10 du taux de réponse moyen sont appelés pixels morts (points noirs).
Tension de bruit du pixel :il s'agit de la valeur effective de la fluctuation de tension du signal de sortie du pixel dans le plan focal d'un pixel dans des conditions d'irradiation de fond, c'est-à-dire le bruit total du signal de l'image de fond.
Taux de réponse du pixel : il s'agit de la tension du signal de sortie générée par le plan focal par unité de puissance de rayonnement dans la plage dynamique pour une certaine période de trame ou de ligne.
(Le balayage de gauche à droite est souvent appelé balayage horizontal ou balayage de lignes, tandis que le balayage de haut en bas est généralement appelé balayage vertical ou balayage de trames).
Causes des mauvais pixels
Des défauts dans le processus de réseau formé par chaque point de collecte de la lumière sur le détecteur infrarouge, ou des erreurs dans le processus de conversion du signal optique, entraîneront des erreurs d'information dans certains pixels de l'image, ce qui se traduira par des valeurs de pixel inexactes dans l'image. Ces pixels défectueux constituent des imperfections dans l'image.
En outre, l'utilisation prolongée de l'imagerie infrarouge dans des environnements à haute température peut entraîner une augmentation du nombre de points défectueux sur le détecteur infrarouge. Cela peut entraîner une dégradation de la clarté de l'image, de l'intégrité de l'imagerie thermique infrarouge et de la précision de la mesure de la température infrarouge.
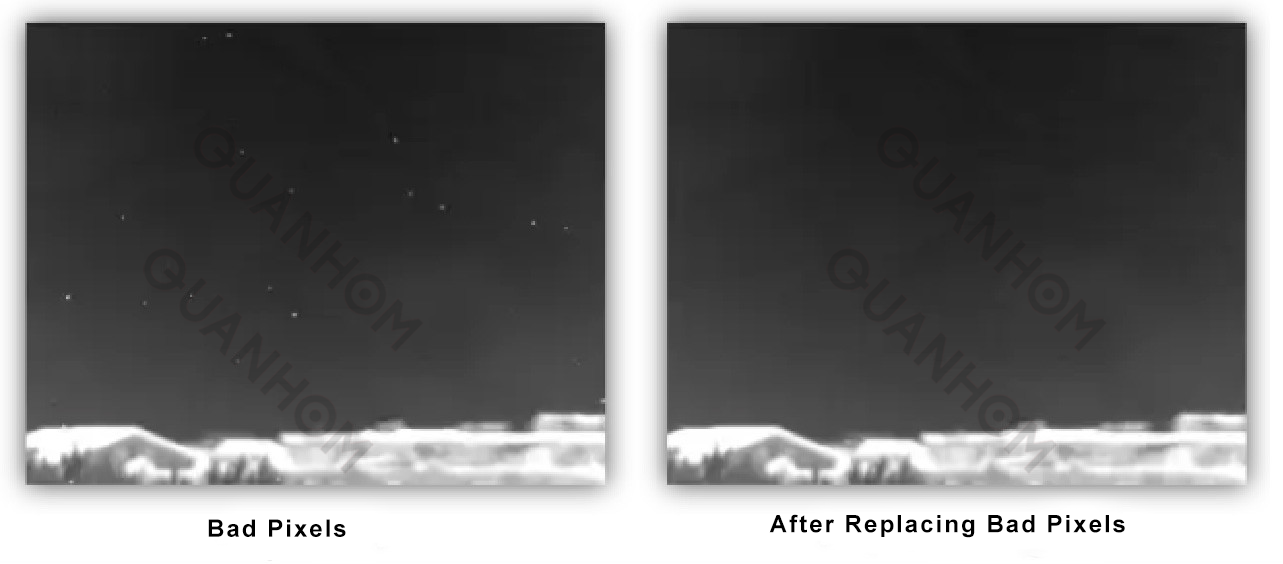
Méthodes de remplacement des mauvais pixels couramment utilisées :
remplacement du point gauche, remplacement du point supérieur, remplacement de la médiane ou de la moyenne du voisinage, etc.
Le principe de l'élimination des mauvais pixels consiste à remplacer la valeur du pixel défectueux par les valeurs des pixels environnants. Vous devez déterminer l'emplacement des mauvais pixels dans une image et utiliser une lentille infrarouge calibrée pour capturer des images du corps noir à différentes températures. La réponse des mauvais pixels à la température est évidemment différente de celle des pixels normaux. Marquez ensuite les coordonnées de ces points et utilisez les pixels environnants pour les remplacer.
Dans la pratique, le remplacement par la moyenne est moins efficace que l'utilisation de la médiane des pixels environnants. En effet, de nombreux mauvais pixels de détecteurs infrarouges ont tendance à se regrouper, ce qui signifie qu'un mauvais pixel peut être entouré d'autres mauvais pixels. L'utilisation du remplacement médian peut réduire l'impact des mauvais pixels environnants sur l'effet de remplacement.
2. images fantômes
Lesimages fantômes désignent les lignes brillantes ou sombres qui apparaissent sur les images infrarouges et qui ne changent pas en fonction de la cible, ce qui se traduit par de faibles halos.

Cause : Cela est dû au taux de réponse inégal de l'élément de détection du détecteur infrarouge au rayonnement infrarouge.
Caractéristiques des images fantômes : Leur profondeur et leurs détails varient selon la scène et la météo, mais la forme globale est cohérente sur un même détecteur.
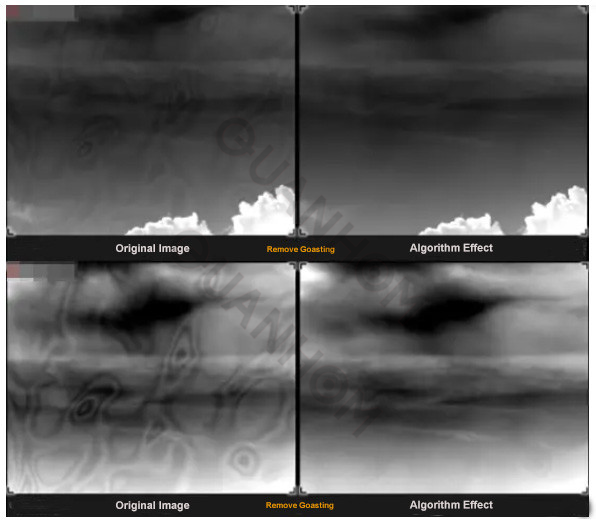
Méthode d'étalonnage : Elle peut être résolue en effectuant un étalonnage en deux points sur site. Généralement, lors de l'étalonnage sur site, visez une cible à basse température telle qu'un ciel propre et sans nuages et appuyez sur la touche de compensation désignée ; visez ensuite une cible de température relativement élevée (vous pouvez choisir le cache d'objectif fermé) et appuyez sur une touche de compensation. Une fois la compensation terminée, le système calculera automatiquement la valeur du coefficient de correction K en fonction de l'arrière-plan collecté par la compensation et effectuera une correction en deux points pour éliminer les images fantômes.
Contexte : fait généralement référence aux valeurs pertinentes générées par l'environnement naturel lui-même sans interférence humaine externe.
3. Effet du couvercle du pot
Des facteurs tels que le changement de champ de vision, l'ajustement de la mise au point, la température ambiante, les chocs et les vibrations de l'imagerie thermique entraîneront des changements évidents dans la non-uniformité introduite par le système optique, ce qui entraînera l'image de sortie de l'imagerie thermique montrant souvent du noir dans le champ de vision. centre et lumineux dans les bords et les coins de l’écran. Le phénomène s’appelle l’effet Pot Lid.

Au cours de l'utilisation, la température du barillet du système optique augmente, ce qui fait que la température du bord de l'objectif est plus élevée que celle du centre, ou que le rayonnement thermique du barillet atteint le détecteur à travers la lentille optique, ce qui fait que le niveau de gris augmente progressivement du centre vers le bord de l'image. Lorsque l'instrument est utilisé plus longtemps, le barillet de l'objectif devient plus chaud et l'effet de vignettage s'aggrave.
Une méthode de suppression de l'effet de vignettage des images infrarouges en temps réel, qui se caractérise par les étapes suivantes :
Étape 1: Allumer la caméra thermique infrarouge, attendre que l'image soit stable, environ 5 minutes, et effectuer une correction non uniforme de l'image ;
Étape 2: après l'étape 1, attendre environ 15 minutes jusqu'à ce que l'effet de vignettage apparaisse, et collecter l'image de l'effet de vignettage pour la scène de rayonnement thermique uniforme ;
Étape 3: La distribution statistique des histogrammes permet de déterminer que le point (x0, y0) le plus proche du centre de l'image dans les pixels relativement sombres de l'image est utilisé comme centre de l'image de l'effet de vignettage ;
Étape 4: En fonction de la résolution et de la formule de l'image
Dmax= max(√(〖〖(x-x0)〗^2+(y-y0)〗^2 )), Calculer la valeur Dmax, Dmax est le point le plus éloigné de (x0, y0) parmi tous les points de pixels ;
Étape 5: Selon le modèle mathématique g(x, y) =a×r2+b×r4, où r est le modèle mathématique lié à la position de l'image, la taille du pas pour a et b est de 0. 1, et la plage est [-2, 2], résoudre itérativement g(x, y), puis calculer la valeurIlight à partir deIlight=Iin×g (x, y), où Iin est l'image originale collectée en temps réel,Ilight est le bruit additif qui doit être requis, et Iout est l'image originale ; utiliser Iout=Iin-Ilight et D(Iout)=∑|Iout-Iideal| pour résoudre la valeur D(Iin). D(Iout) est l'écart entre l'image de sortie idéale et l'image de sortie réelle. Comparez la valeur D(Iin) obtenue pour chaque groupe de a et b, et enregistrez la combinaison de a et b ayant la plus petite valeur D(Iin) ;
Étape 6: Utilisez le centre de l'effet de vignettage de l'image (x0, y0) obtenu à l'étape 3, le Dmax calculé à l'étape 4 et la combinaison de a et b lorsque D(Iin) est minimisé à l'étape 5 pour calculer lalumière de différentes images de la scène en temps réel. Utilisez lout = Iin-Ilight pour supprimer l'effet de vignettage de l'image en temps réel.
4 Mesures de prévention et d'amélioration
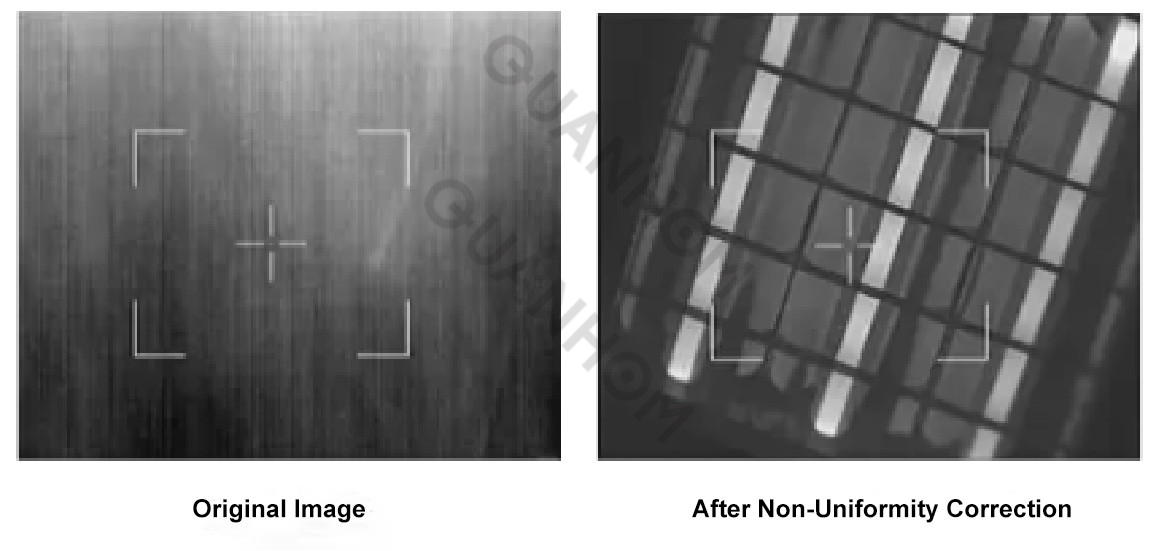
-Correction de l'absence d'uniformité
En raison des limites du processus de fabrication des détecteurs infrarouges, chaque élément de détection du détecteur infrarouge a un taux de réponse différent au rayonnement infrarouge. Les fantômes et les mauvais pixels mentionnés ci-dessus apparaîtront sur la surface d'imagerie, ce qui affectera la qualité de l'imagerie thermique.
Différents pixels de la matrice de plans focaux infrarouges ont des amplitudes de signal de sortie vidéo différentes sous le même rayonnement incident uniforme. C'est ce que l'on appelle la non-uniformité de la réponse de la matrice infrarouge à plan focal. La correction de la non-uniformité est un moyen technique qui réduit efficacement la non-uniformité du taux de réponse du détecteur (c'est-à-dire le bruit spatial inhérent au détecteur) et améliore la qualité de l'imagerie thermique. Le bruit spatial fait référence à la différence entre les signaux de sortie de différents pixels lorsqu'une caméra thermique observe une cible. Le bruit spatial peut également être divisé en bruit spatial à basse fréquence (bruit de non-uniformité) et en bruit spatial à haute fréquence (bruit de motif fixe FPN). Après la correction de la non-uniformité, l'image de la caméra thermique est uniforme, les fantômes et les mauvais pixels disparaissent, et l'effet d'imagerie est considérablement amélioré, ce qui peut grandement améliorer la capacité d'observation de la caméra thermique.
Méthodes de correction couramment utilisées : correction en un point, correction en deux points, correction multipoint, etc.
Méthode de correction en un point : une méthode qui permet de corriger les signaux de sortie de chaque pixel pour qu'ils soient cohérents. Cette approche consiste à corriger les valeurs de réponse de différents pixels pour obtenir la même valeur de réponse sous la même intensité de rayonnement lumineux, car ils sont sous le même éclairage. Il peut s'agir de la valeur moyenne du signal à ce moment ou de la valeur maximale dans cette condition.
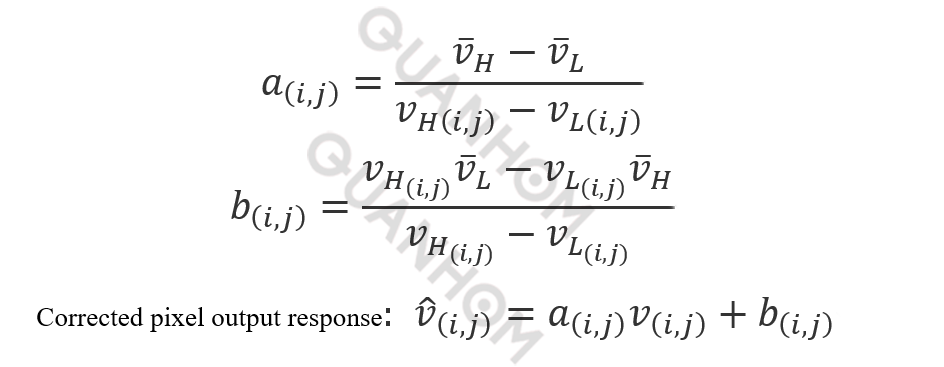
La méthode de correction en deux points est l'un des algorithmes de correction couramment utilisés. La méthode de mise en œuvre consiste à prendre les conditions de rayonnement du corps noir à deux températures comme points d'étalonnage, à utiliser le détecteur pour obtenir une image de rayonnement infrarouge uniforme lorsque la source de rayonnement est un corps noir à la température correspondante, et à calculer les réponses des pixels VL(i,j ) et VH(i,j) et les réponses moyennes des pixels ¯VL et ¯VH lorsque les températures du corps noir sont TL et TH. Les gains a(i,j) et b(i,j) de chaque pixel sont obtenus grâce à la formule :
une(i,j)=¯VH-¯VL / VH(i,j)-VL(i,j)
b(i,j)= VH(i,j)^¯VL - VL(i,j)^¯VH / VH(i,j)- VL(i,j)
Réponse de sortie de pixel corrigée : ^V(i,j)= a(i,j) V(i,j)+ b(i,j)
Différente de la méthode de correction en deux points, qui utilise simplement un modèle linéaire pour remplacer la courbe de réponse réelle, la méthode multipoint reconnaît la courbe de réponse. Pour chaque segment de la polyligne, la méthode de mise à l'échelle à deux points est utilisée pour calculer les an(i,j) et bn(i,j) correspondants, qui sont les numéros de série du segment de polyligne. Après l'étalonnage, une série de paramètres de décalage an(i,j), de paramètres de gain bn(i,j) et de réponses de pixels de pré-correction correspondant aux extrémités des segments de ligne sont stockées pour des opérations de correction. Pendant l'opération de correction, déterminez d'abord l'intervalle en fonction de la réponse de pré-correction du pixel, trouvez les an(i,j) et bn(i,j) correspondant à l'intervalle et calculez la réponse de sortie du pixel corrigée ^V( je,j).
·Compensation
Une compensation est effectuée pour obtenir les données brutes nécessaires à la correction de non-uniformité. Afin d'obtenir une image infrarouge idéale pendant le fonctionnement réel de l'imagerie thermique, il est recommandé à l'utilisateur d'effectuer des opérations de compensation sur l'imagerie thermique lorsqu'elle vient d'être allumée ou pendant un fonctionnement à long terme.
Méthode de compensation : La cible de compensation peut sélectionner différents objets avec une température uniforme en fonction de l'environnement sur site et des caractéristiques de la cible. Dirigez ensuite l'imagerie thermique vers la cible de compensation uniforme et enregistrez les données d'imagerie originales à ce moment-là en tant que données d'arrière-plan requises pour la correction de non-uniformité.
Objectif de compensation : Objets à température uniforme ; Un ciel propre et sans nuages ; Obturateur intégré à la caméra thermique.
· SDRAM et FLASH
L'image d'arrière-plan collectée lorsque l'imagerie thermique effectue une compensation, le coefficient de correction généré par la correction de non-uniformité, les données de correction des pixels morts et certains paramètres de contrôle requis pour le fonctionnement normal de la machine, etc., toutes ces données sont stockées dans la mémoire. stockage FLASH à l’intérieur de la machine. Une fois l'imagerie thermique activée, elle transfère automatiquement les données en FLASH dans la mémoire SDRAM de la machine. Les données chargées dans la SDRAM disparaissent automatiquement après la désactivation de l'imagerie thermique.